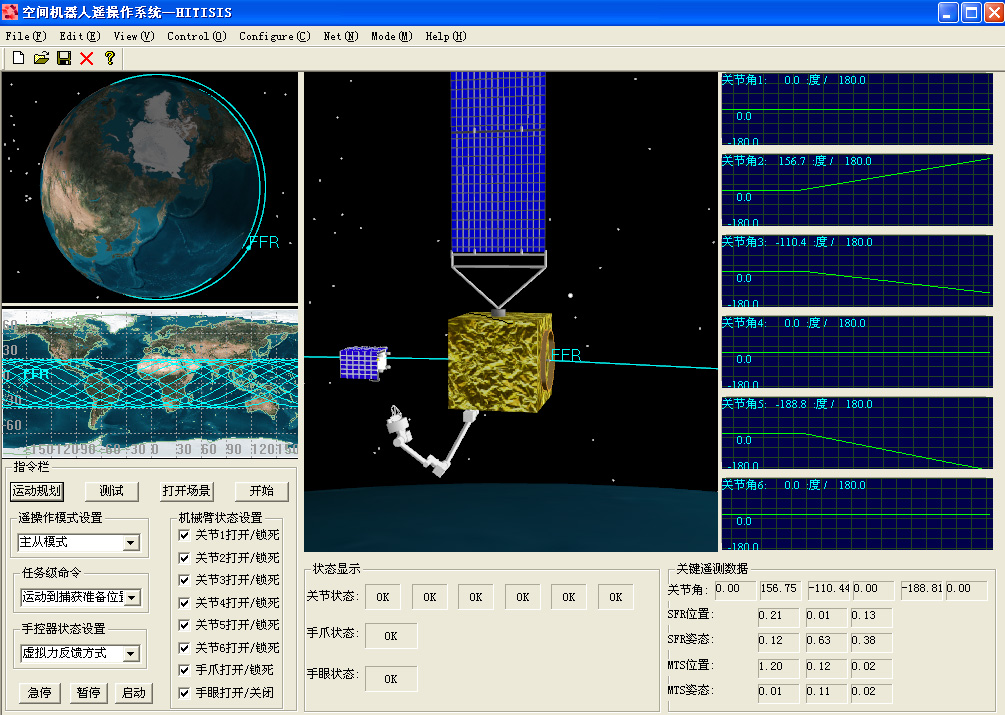
研制了大型折展机构、自重构机构及空间机器人系统,提出“机-电-热-控”多重耦合动力学建模、“结构-驱动-控制”相融、自主轨迹规划与智能控制等理论及方法,解决了恶劣太空环境下漂浮基、大挠性、强耦合、变拓扑复杂系统设计、建模与控制等关键难题,为航天器在轨组装与维修维护、轨道垃圾清理等提供技术支撑。成果用于航天型号,获国家技术发明二等奖1项、省技术发明一等奖1项、军队科技进步一等奖2项,出版专著3部。
上一条:等离子体激励器对典型翼面流动分离控制
【关闭】