首页
基础研究
应用技术
当前位置:
首页
>>
科技成果
>>
应用技术
应用技术
010.电子信息
011.计算机软件
012.计算机硬件
013.计算机网络
014.微电子、光电子技术
015.数字音视频技术
016.通信技术
017.电子专用设备及测试仪表
018.其它
020.航空航天技术
021.航空技术
022.航天技术
030.先进制造技术
031.自动化机械及设备技术
032.高性能、智能化仪器仪表技术
033.其它
040.生物、医药和医疗器械技术
041.生物技术
042.医药技术
043.轻工、食品技术
044.新型医疗器械技术
045.其它
050.新材料及其应用
051.电子信息及半导体材料
052.生物及医用材料
053.先进汽车材料
054.金属材料
055.非金属材料及先进建筑材料
056.高分子材料及复合材料
057.纳米材料
058.其它
060.新能源与高效节能
061.新型能源技术
062.石油天然气勘探开发与利用
063.煤炭能源的综合利用
064.电能与电力
065.高效节能技术
066.其它
070.环境保护与资源综合利用技术
071.大气污染防治技术
072.水污染防治技术
073.固体废弃物处理技术
074.环境监测及环境生态保护技术
075.噪声及辐射污染防治技术
076.资源综合利用
077.海洋工程技术
078.其它
080.核应用技术
090.农业
091.优良动植物新品种
092.家畜良种胚胎生物技术
093.生物农药及生物防治技术
094.新型饲料、肥料及添加剂技术
095.农业机械设备技术
096.农副产品贮藏、加工技术
097.其它
100.现代交通
101.城市交通
102.公路、铁路、水运、海运和空运
110.城市建设和社会发展
111.城市建设
112.城市安全
113.文教、体育
114.其它
应用技术
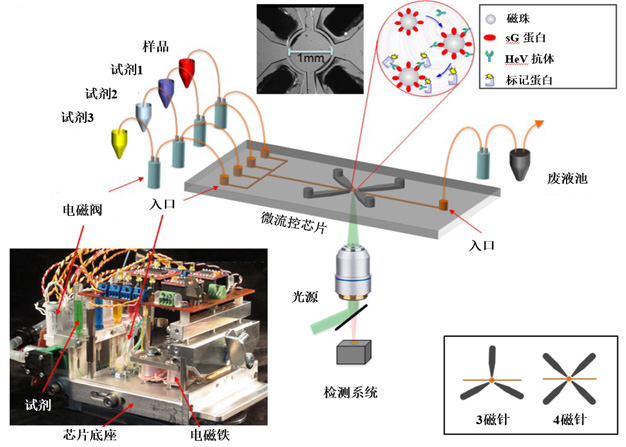
用于病毒自动化检测的微流控系统
一种利用磁性纳米粒子进行免疫测定的微流控芯片装置,该装置通过磁极驱动纳米粒子的运动实现了流体的混沌混合,利用该混合技术可在15分钟内检测出亨德拉病毒(HendraVirus, HeV)抗体,检测限约为0.48 ng/ml,比...
2020年10月30日 点击:[
] 次
航天器电源系统
针对我国航天器电源系统中高压大功率卫星电源控制器(Power Conditioning Unit,PCU),开展基础研究和技术攻关,解决了我国大功率卫星平台PCU研制难题。研发了高压大功率卫星电源拓扑结构、控制方法,突破了PCU核...
2020年10月30日 点击:[
] 次
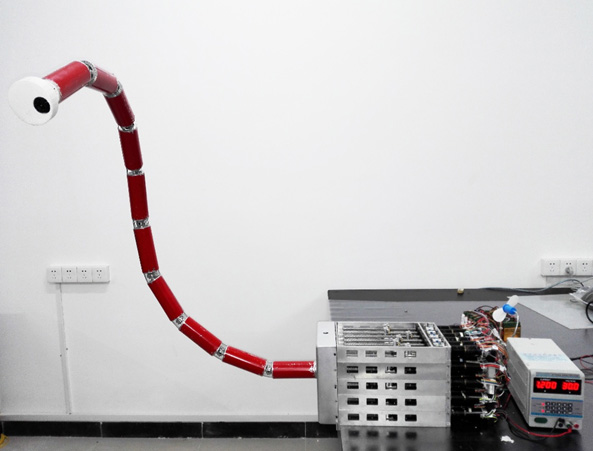
精细作业柔性机器人
绳驱超冗余精细作业柔性机器人,具有机电分离、体型纤细、臂形连续、变刚度柔顺控制等特点,可在狭小空间、恶劣环境下,开展装配、检测、维修、维护等精细作业任务。长度0.5m-4.5m可配置,直径30-100mm可配置,自...
2020年10月30日 点击:[
] 次
大型仿生扑翼飞行机器人
翼展2.3m、续航超过30分钟、可抗4级风,性能国际领先。自主研制的40只凤凰亮相央视春晚,成为国内外首次
2020年10月30日 点击:[
] 次
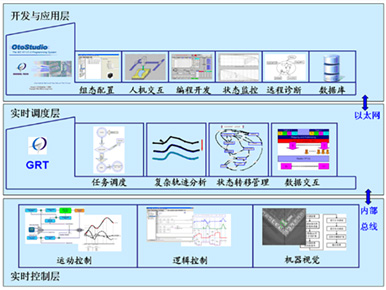
驱控一体化装配机器人控制系统
针对工业装配,尤其是3C装配中产品差异化、周期短、精度高、工艺复杂等难题,提出了开放、工艺可重构的层次化软件体系与高性能、高精度、低能耗、拓展灵活的CPU+DSP+FPGA硬件架构,并结合基于机器人动力学模型的...
2020年10月30日 点击:[
] 次
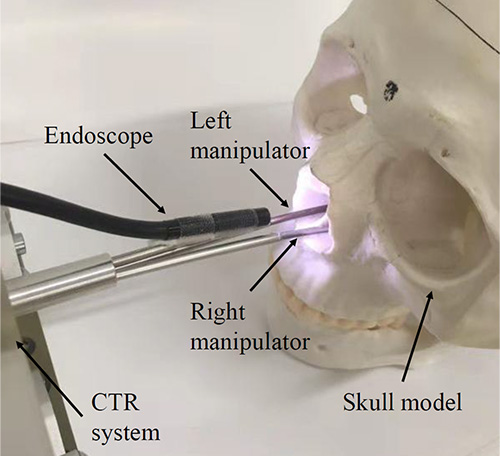
微创手术机器人
研发了面向狭窄腔道的多臂连续型微创手术机器人系统,具有小型化、易操作、形状可控、创伤小、多功能集成等优点。
2020年10月30日 点击:[
] 次
面向护理机器人安全作业的柔顺机构设计
高功率密度的变刚度关节,大扭矩、大刚度调节范围,提高保姆型护理机器人的人机交互安全性。大负载绳驱拟人机械臂,较高负载自重比,提高移乘搬运过程中护理对象的安全性和舒适性。三种不同扭矩需求的柔性关节绳...
2020年10月30日 点击:[
] 次
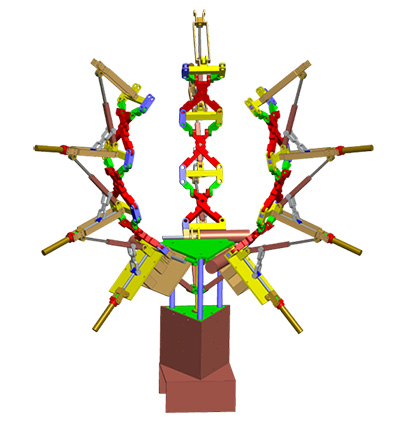
基于自由度分叉的空间桁架式可展开抓捕机械手
提出了一种基于自由度分叉的空间桁架式可展开抓捕机械手,该机械手组成有三个手指和一个单自由度伞状手掌机构,每个手指由三个独立的可变胞并联基础模块单元通过特殊的连接方式连接而成。由于基础模块单元采用了...
2020年10月30日 点击:[
] 次
智能仿生微纳米机器人
微纳米机器人(Micro/Nano-motors, MNMs)作为一种具有自主运动功能的智能化微纳米平台,成为一种变革性的新技术,被广泛应用于靶向药物递送、微创手术、生物传感、污水降解等众多领域。酶驱动微纳米机器用于高...
2020年10月30日 点击:[
] 次
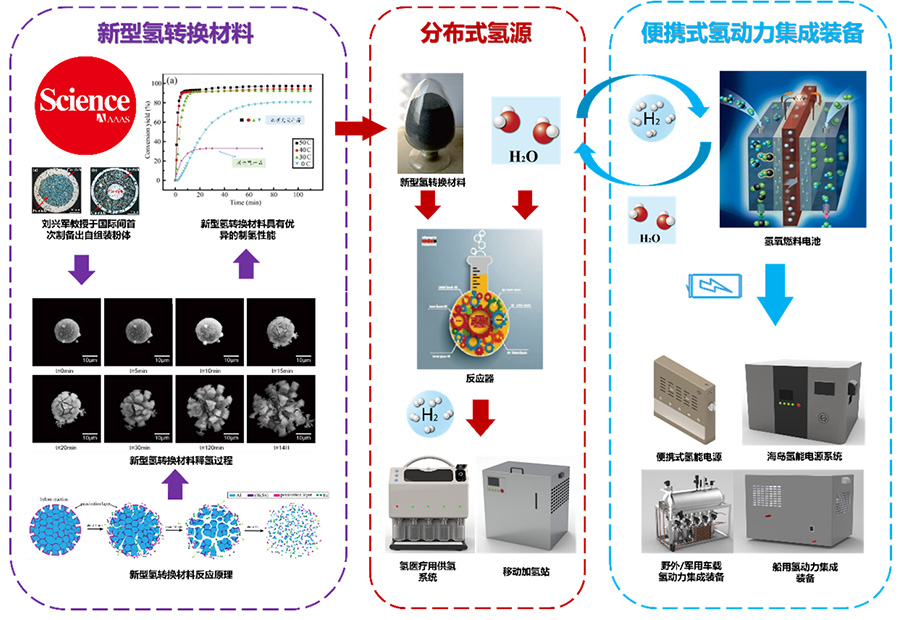
基于新型氢转换材料的便携式氢动力集成装备的开发
新型氢转换材料实现了简单、高效、即时即地制氢,结合氢氧燃料电池,可为国民经济和军事领域提供便携式电源的解决方案。关键产品技术已达国际先进水平,增强了我国在氢能制取和应用技术上的核心竞争力。
2020年10月30日 点击:[
] 次
共41条
首页
上页
1
2
3
4
5
下页
尾页