针对工业装配,尤其是3C装配中产品差异化、周期短、精度高、工艺复杂等难题,提出了开放、工艺可重构的层次化软件体系与高性能、高精度、低能耗、拓展灵活的CPU+DSP+FPGA硬件架构,并结合基于机器人动力学模型的规划和控制以及基于电流环的机器人实时碰撞检测算法,满足了实际装配系统的高柔性与高精度的需求。
本项目研发了驱控一体化装配机器人控制系统,实现产业化,产生良好的经济效益和社会效益。项目获得了科技部863计划重大项目和深圳市科创委的项目资助,获得了2019年度深圳市科技进步一等奖。
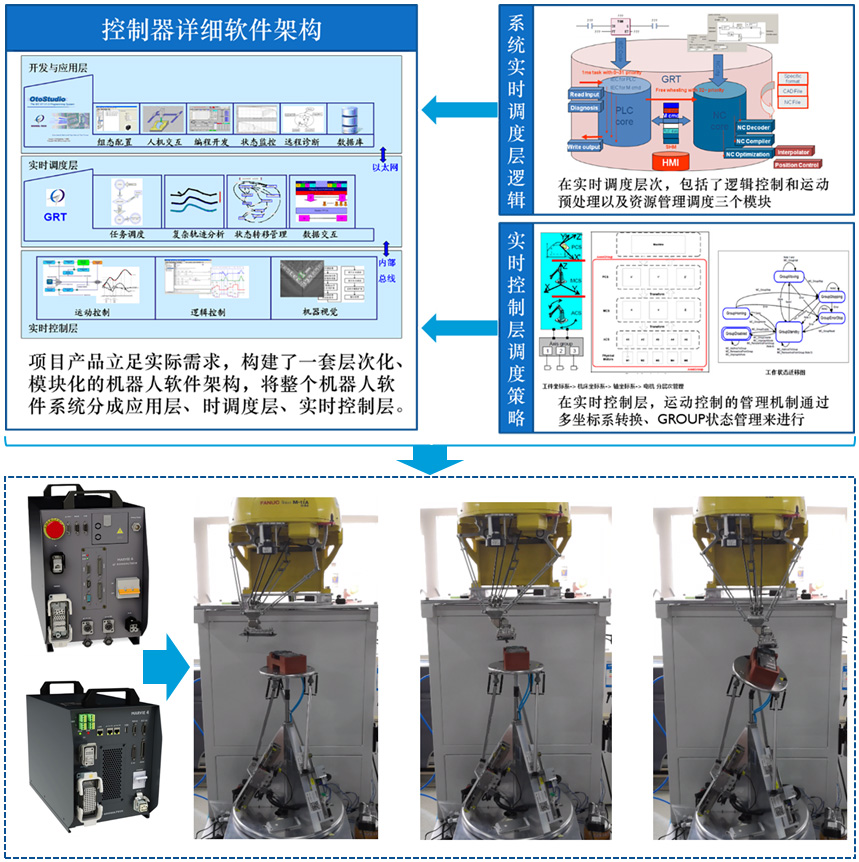
图1 驱控一体化装配机器人控制系统及其在3C装配中的应用
图2 2019年度深圳市科技进步一等奖

