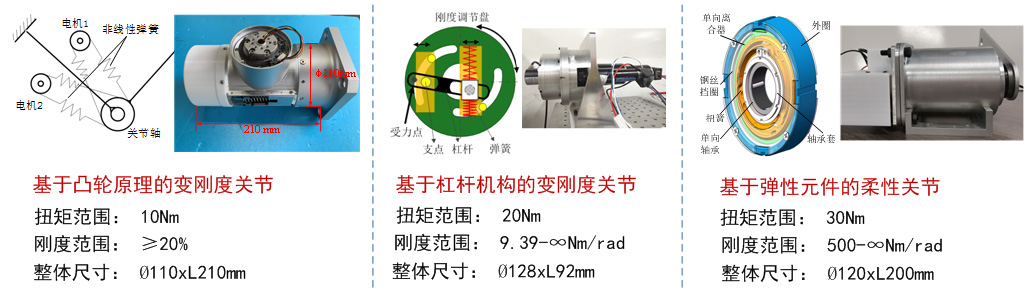
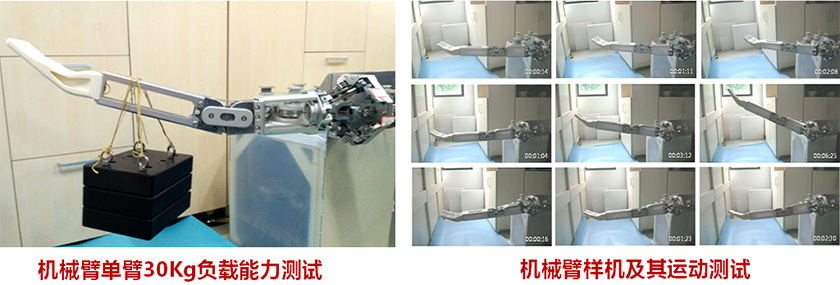
高功率密度的变刚度关节,大扭矩、大刚度调节范围,提高保姆型护理机器人的人机交互安全性。大负载绳驱拟人机械臂,较高负载自重比,提高移乘搬运过程中护理对象的安全性和舒适性。
三种不同扭矩需求的柔性关节
绳驱拟人大负载机械臂
上一条:驱控一体化装配机器人控制系统 下一条:基于自由度分叉的空间桁架式可展开抓捕机械手
【关闭】