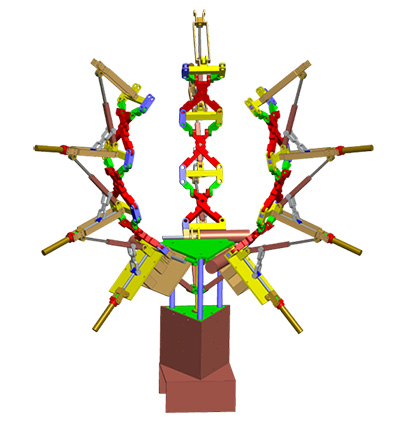
提出了一种基于自由度分叉的空间桁架式可展开抓捕机械手,该机械手组成有三个手指和一个单自由度伞状手掌机构,每个手指由三个独立的可变胞并联基础模块单元通过特殊的连接方式连接而成。由于基础模块单元采用了剪刀叉机构和变胞设计使得其不仅有优良的可折展性能还可通过一个驱动实现展开和抓捕两种运动。
抓捕机械手理论模型
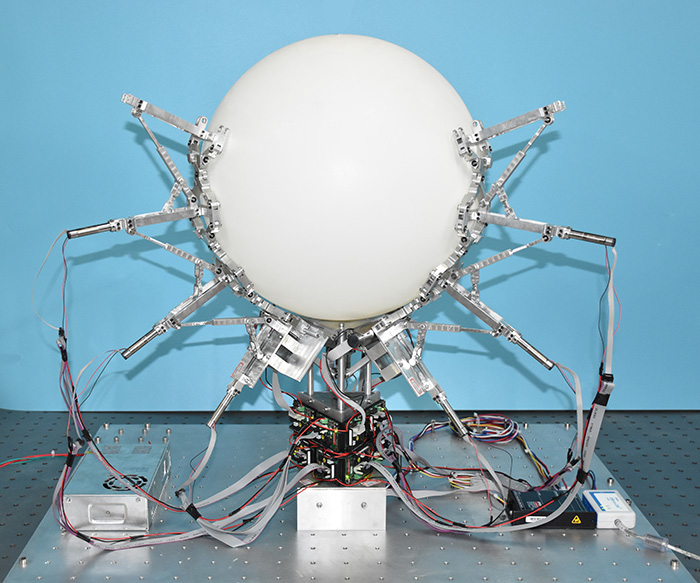
抓捕机械手实际模型
上一条:面向护理机器人安全作业的柔顺机构设计 下一条:超声精密加工系统
【关闭】